 The
TDC aboard Cod is a true mechanical computer.
The
TDC aboard Cod is a true mechanical computer.
By Terry Lindell
The
TDC aboard Cod is a true mechanical computer.
The TDC was unique in World War II. It was the computational part of the first submerged integrated fire control system that could track a target and continuously aim torpedoes by setting their gyro angles. The TDC Mark III gave the U.S. fleet submarine the ability to fire torpedoes without first estimating a future firing position, changing the ship's course, or steering to that position. Instead of hoping that nothing in the setup changed, a fleet submarine with the TDC could fire at the target when the captain judged the probability of making hits to be optimal.
In World War II a torpedo's gyro angle was set mechanically while it was in the tube. A shaft, known as the spindle, slips into a socket near the housing of the torpedo's course gyroscope. When the fire control system rotates the shaft, the gyroscope rotates. After being fired, the torpedo travels on a straight course for a known distance called the "reach". A delay in the release of the torpedo's gyro steering mechanism by a threaded shaft determines the magnitude of the reach. Once engaged, the steering mechanism brings the torpedo to a new course based on the angular offset of the gyroscope.
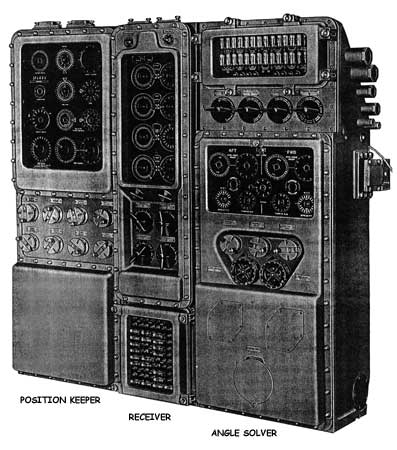
The Mark III computer consisted of two sections, the position keeper and the angle solver. The Mark IV TDC now on COD also includes a center section called the receiver. The position keeper tracks the target and predicts its current position. To do this, the position keeper automatically receives input of the ship's own course from the gyro compass, and own ship's speed from the pitometer log. The position keeper has hand cranks on its face that set the target length, estimated speed, and angle on the bow. It also contains a sound bearing converter that calculates the target's location based on sonar measurements.
The position keeper solves the equations of motion integrated over time. The result is a continuous prediction of where the target is at any instant. Successive measurements of the targets' position are compared to the position keeper predictions and corrections for error are introduced with the hand cranks. The predicted target position becomes more accurate as more measurements make the corrections smaller. It is typical to get an accurate track on the target after about three or four observations under good conditions.
The angle solver automatically takes the target's predicted position from the position keeper, combines it with the tactical properties of the torpedo, and solves for the torpedo gyro angle. Values calculated from this solution are returned to the position keeper in two feedback loops. The gyro angle automatically goes to each of the torpedo rooms and is set into the torpedoes continuously. The TDC controls both torpedo rooms and all 10 torpedo tubes at once.
The U.S. Navy thus had a system that would point the torpedoes at a target as the fire control problem developed. The TDC Mark III was the only torpedo targeting system of the time that both solved for the gyro angle and tracked the target in real time. The comparable systems used by both Germany and Japan could compute and set the gyro angle for a fixed time in the future, but did not track the target. Thus the idea of the position keeper, and its iterative reduction of target position error was unique to the U.S. Navy, and represented a distinct advantage.
Webmaster's note: Thanks to Terry, Cod's Mark IV TDC has been brought back on-line (as of June 2003) and appears to work perfectly once again! According to Terry this is now the only working Mark IV TDC in the world. Click here to see the TDC Resoration page.